Description
Product Description
- Single-axis linear motion stage with both long stroke and high precision
- Equipped with a high-performance two-phase stepper motor and microstep subdivision technology for nanometer-level pulse resolution
- Offers a wide speed range (0.78 mm/s to 6.25 mm/s) and adjustable jog function (0.01–0.5 mm)
- Supports free motion control modes including jog, creep, and Hall stepless speed regulation for forward/backward feeding
- Realizes interaction with host computer programs via USB serial communication, adopting the ASCII O’motion instruction set as the communication protocol
- Enables the development of host computer control programs on Windows/Linux/MacOS/Android and other operating systems for cross-platform applications
- Provides Windows-version host computer control program samples and communication protocol documents for convenient secondary development or system integration by users
- Recommended for use with O’motion single-axis/4-axis motion controllers
This linear motion stage with long stroke and high precision must be used with the O’motion motion controller.
表格
| Model | OLTS-150L | OLTS-300L |
| Dimensions | 352.5×100×40.5 mm | 492.5×100×40.5 mm |
| Total Stroke | 146 mm | 296 mm |
| Weight | 1896.8 g | 2471.2 g |
| Tabletop Size | 100×90 mm | 100×90 mm |
| Tabletop Threads | 16×M6, 6×Ø3 mm (dowel holes) | 16×M6, 6×Ø3 mm (dowel holes) |
| Lead Screw | Ø8 mm, 1 mm lead | Ø8 mm, 1 mm lead |
| Guide Rail Type | Dual linear guide rails | Dual linear guide rails |
| Material | Aluminum alloy + high carbon steel | Aluminum alloy + high carbon steel |
| Accuracy Specifications | – | – |
| Full-Step Resolution | 0.002 μm/pulse | 0.002 μm/pulse |
| Half-Step Resolution | 0.001 μm/pulse | 0.001 μm/pulse |
| Maximum Speed | 6.25 mm/s | 6.25 mm/s |
| Minimum Speed | 0.78 mm/s | 0.78 mm/s |
| Jog Distance | Adjustable range: 0.01–0.5 mm | Adjustable range: 0.01–0.5 mm |
| Positioning Accuracy | ±0.01 mm | ±0.01 mm |
| Unidirectional Repeat Positioning Accuracy | ±0.02 mm | ±0.02 mm |
| Bidirectional Repeat Positioning Accuracy | ±0.03 mm | ±0.03 mm |
| Load Capacity | 11.7 kg | 11.7 kg |
| Motor & Sensor Specifications | – | – |
| Motor Type | Two-phase stepper motor | Two-phase stepper motor |
| Motor Model | 28BYG-60AB | 28BYG-60AB |
| Rated Current | 0.6 A/Ph | 0.6 A/Ph |
| Step Angle | 1.8° | 1.8° |
| Microstep Count | 51200 | 51200 |
| Sensor Type | Slot-type photoelectric sensor | Slot-type photoelectric sensor |
| Sensor Supply Voltage | DC 5V | DC 5V |
| Current Consumption | 50 mA | 50 mA |
| Output Electrical Characteristic | NPN normally closed | NPN normally closed |
| Signal Validity | Low level active | Low level active |
Recommended Driver/Controller | O’motion single-axis stepper motion controller, O’motion 4-axis motion control system | O’motion single-axis stepper motion controller, O’motion 4-axis motion control system |
*Note: The maximum and minimum motion speeds and jog distance depend on the pulse frequency and settings of the motion controller. Therefore, all parameters marked with * above are test results obtained with the Oeabt® O’motion 4-axis motion control system.
Motor Output (OSMC-1U)
表格
| Specification | Value |
| Model | OSMC-1U |
| Drive Voltage | DC 12V–24V |
| Max Drive Current | 2 A |
| Drive Type | 16-bit PWM control |
| Control Algorithm | PID |
| High-Resolution Stepping | 51200 microsteps per revolution (for 1.8° step angle two-phase motor) |
| Subdivision Multiple | 16X–256X (software adjustable) |
| Encoder Feedback Bandwidth | 500 Hz |
| Position Counter | 32-bit |
| Operation Modes | Position, Speed, Motion Cycle |
| Acceleration/Deceleration Mode | S-curve |
| External Trigger Control | Frequency recognition |
| Power-off Memory | Yes, position holding |
| Communication Protocol | Open ASCII command |
| Supported Systems | Cross-platform |
| Secondary Development SDK | Protocol documents |
| Motor Connector | D-sub26 (MDR20 for open-loop control) |
| Motor Drive Output | DC two-phase |
| Quadrature Encoder (QEP) Input | PID |
| Limit Switch Input | Positive limit, Zero position limit |
| Encoder Power Supply | DC 5V |
| Front Panel Controls | Hall stepless speed regulation joystick |
| Input Power Requirement | DC 12V–24V |
| Max Output Current | 2 A Max |
| Housing Dimensions | 76.0×74.2×47.0 mm |
| Weight | 183.5 g |
*Note: For pulse width recognition, a dedicated complex signal generator is required to generate signals with different pilot pulse widths to determine the motion direction, and the motion speed is adjusted according to the pulse frequency. For frequency recognition, the motion direction is determined solely by the frequency level, and the speed follows the user’s global speed setting (1–8x). Therefore, the requirements for user signals are simple, with only frequency modulation characteristics required.
BASE-PL
表格
| Specification | Value |
| Dimensions | 200×90×6 mm |
| Thread Holes | 4×M4 (countersunk holes), 6×M6, 2×Ø12 mm (through holes), 4×Ø4 mm (blind holes), 2×Ø3 mm (locating holes) |
| Weight | 281.6 g |
| Material | 7075 aluminum alloy |
APT-90L
表格
| Specification | Value |
| Dimensions | 102×98×230 mm |
| Thread Holes | Base plate: 8×M6 (countersunk holes); Side plate: 3×M6, 2×Ø3 mm (locating holes) |
| Weight | 1104.4 g |
| Material | 7075 aluminum alloy |
Technical Notes
The stage is equipped with a high-performance two-phase stepper motor and achieves nanometer-level pulse resolution through advanced microstep subdivision technology. When used with the O’motion motion controller, it supports stepless speed regulation from 0.78 mm/s to 6.25 mm/s and features an adjustable jog function with a flexible setting range of 0.01–0.5 mm for jog distance. Users can realize precise forward and backward feeding motion through multiple control modes such as jog, creep and Hall stepless speed regulation.

In terms of system integration, the stage supports USB serial communication and adopts the standard ASCII O’motion instruction set, which is compatible with multiple operating systems including Windows, Linux, MacOS and Android, providing users with a convenient cross-platform development experience. Windows-version host computer control program samples and complete communication protocol documents are supplied with the product for easy secondary development and system integration by users.

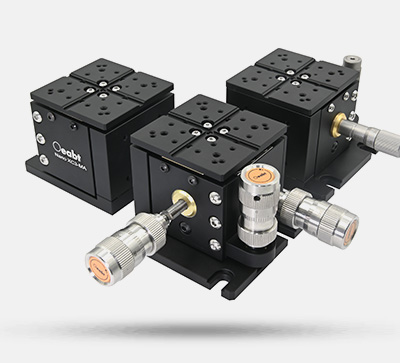
The stage is equipped with threaded holes and locating dowel holes, providing ample flexibility for the installation of various tooling and fixtures. It adopts a USB serial communication interface, supports the ASCII O’motion communication protocol, and is fully compatible with multiple operating systems including Windows, Linux, MacOS and Android.

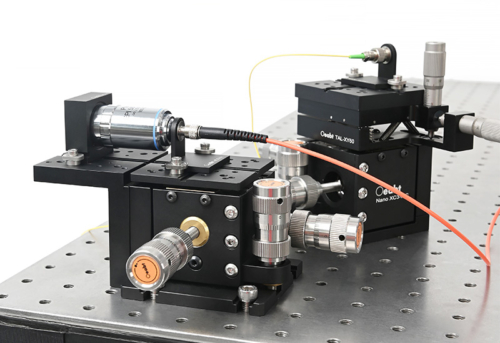
Adapter plates and right-angle brackets allow multiple stages to be configured into XY, XZ and XYZ multi-axis setups.


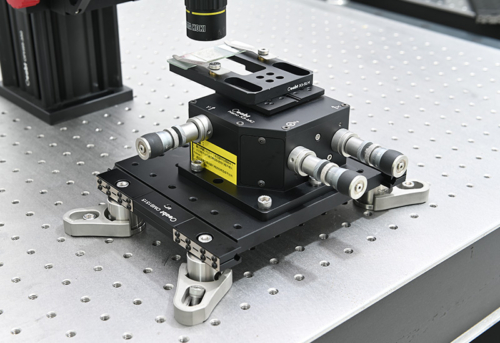
Assembly

Application Examples