Description
Product Description
- Builtin drive and control circuit, equipped with dualshaft 42BYG stepper motor; supports electric/manual dual mode.
- Builtin PID control for smooth acceleration/deceleration profiles, stable start/stop without jitter.
- Default 256× microstepping for smooth, quiet, and stable motion.
- Hall joystick for realtime, linear, smooth stepless acceleration/deceleration control.
- Supports jog, slow feed, and hallcontrolled variable speed forward/backward motion.
- Poweroff position memory: no automatic homing after restart (manual homing available).
- Motor reset and speed switching (high/low) via combination keys.
- USB serial communication with host software using ASCII O’motion command set.
- Crossplatform support: Windows / Linux / MacOS / Android.
- Windows host example program and protocol document provided for secondary development and system integration.
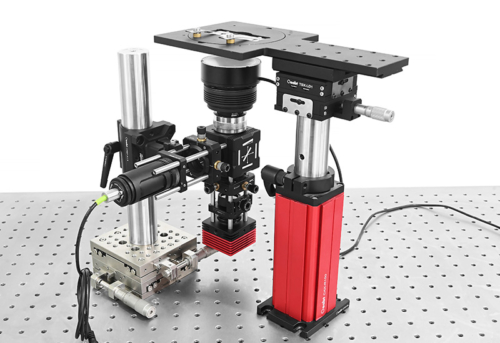
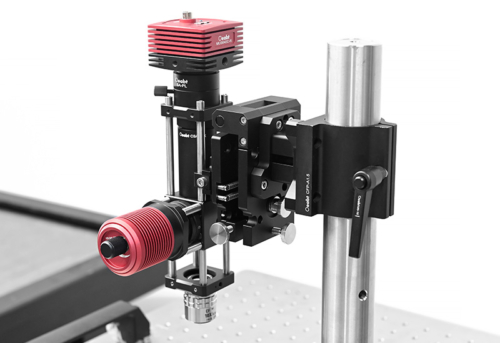
An integrated submicron resolution lifting stage ideal for applications requiring smallincrement vertical motion.
Specifications
表格
| Item | Details |
| Dimensions | 286.0×181.5×72.3 mm |
| Lifting Travel | 25 mm |
| Platform Height | Min: 72.3 mm; Max: 99 mm |
| Table Size | 178×160 mm |
| Lead Screw | Ø12 mm precision ball screw, lead 2 mm |
| Guide Type | Dual linear guides |
| Load Capacity | Recommended ≤ 30 kg (65 lb) |
| High Speed | 2.5 mm/s |
| Low Speed | 1.83 mm/s |
| Jog Increment* | 82 μm |
| Bidirectional Repeatability | 5 μm |
| Backlash | 5 μm |
| Flatness | ≥ 0.02 mm |
| Motor Type | 42BYG stepper motor |
| Step Angle | 1.8° |
| Microsteps | 51200 |
| Operating Voltage | DC 12 V |
| Operating Current | 2 A |
| Sensor | Slot photo sensor (NPN normally open, active high) |
| Control Interface | USB serial port |
| Communication Protocol | ASCII O’motion command set |
| Compatible OS | Windows / Linux / MacOS / Android |
| Development Support | Windows example code + protocol document |
| Recommended Controller | O’motion 1axis / 4axis motion controller |
*Note: Speed and jog increment depend on pulse frequency and settings. Values measured with Oeabt® O’motion 4-axis motion control system.
Technical Notes
Driven by 42BYG motor and precision ball screw, with 25 mm vertical travel and load up to 30 kg. Integrated drive/control circuit supports electric/manual mode and hall joystick stepless speed control, designed for precision vertical positioning in research and automation.

The stage features electric/manual operation, jog/slow feed, and poweroff position memory (no rehoming needed). It supports USB serial communication across Windows/Linux/MacOS/Android, uses the standard ASCII O’motion protocol, and includes full development documents and sample code for easy integration.

Manual control via hall joystick (stepless speed); automatic operation via preprogrammed routines. No external controller required for precision motion control, simplifying system structure and installatio

Application Examples

Process Drawings
OPZA25-AI0 Engineering Drawing